
The 1980s: a decade when robots were as vogue as Madonna. They graced the covers of popular magazines and strutted their stuff across the silver screen. Having grown up in the ’80s, it’s no wonder why the Computer History Museum’s stellar collection of robots is my favorite. Aside from popular culture, robots are also an important part of computing history. I’ll be sharing some insight into the history of robots and also highlighting some of my favorite robots currently on display at the Museum.
For more than two thousand years, people have been creating devices that qualify as robots; after all, the most basic definition of a robot is a machine that can do the work of a person and that works automatically. The Ancient Egyptians, Greeks, Chinese, Persians, and Romans all worked with mechanical systems that replaced human work with automation. For example, the Antikythera mechanism is often referred to as the earliest known analog computer, dating back to 150–100 BC. The medieval world continued to be obsessed with automata. Al-Jazari, an Islamic scholar, inventor, engineer, mathematician, and artist, authored The Book of Knowledge of Ingenious Mechanical Devices in 1206, where he designed and described over 100 mechanical devices, like this elephant clock from the Metropolitan Museum of Art. During the Renaissance, lifelike mechanical figures that originated out of the clockmaking traditions of France, Germany, and England became common fixtures in the Wunderkammern, or cabinet of curiosities, of European courts.
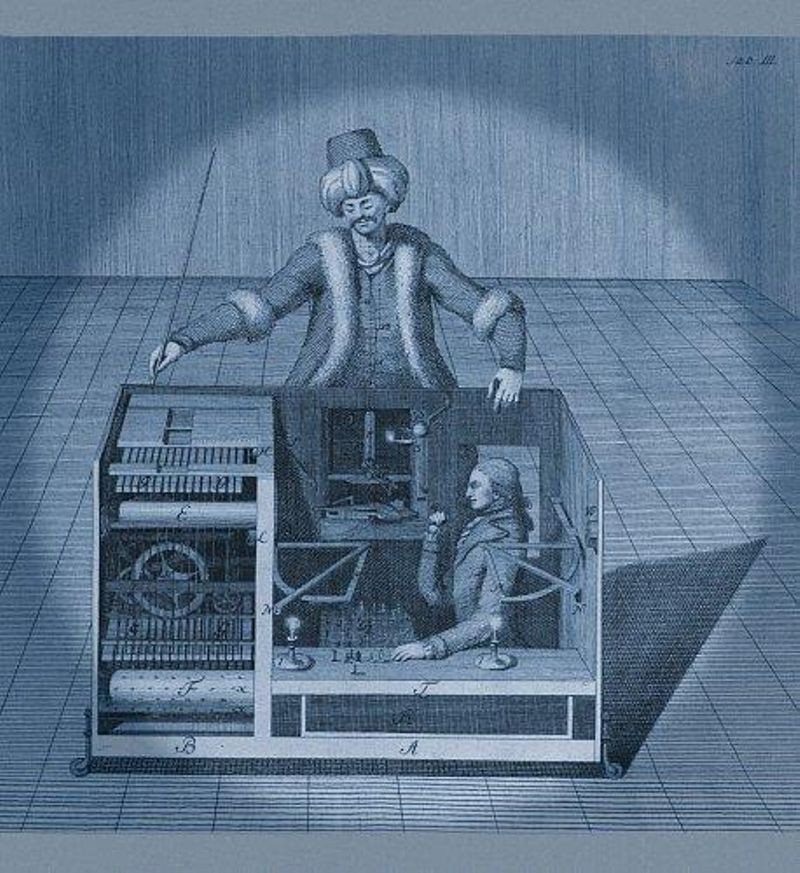
Joseph Racknitz, Engraving of the Turk, 1789. Courtesy of the Library Company of Philadelphia.
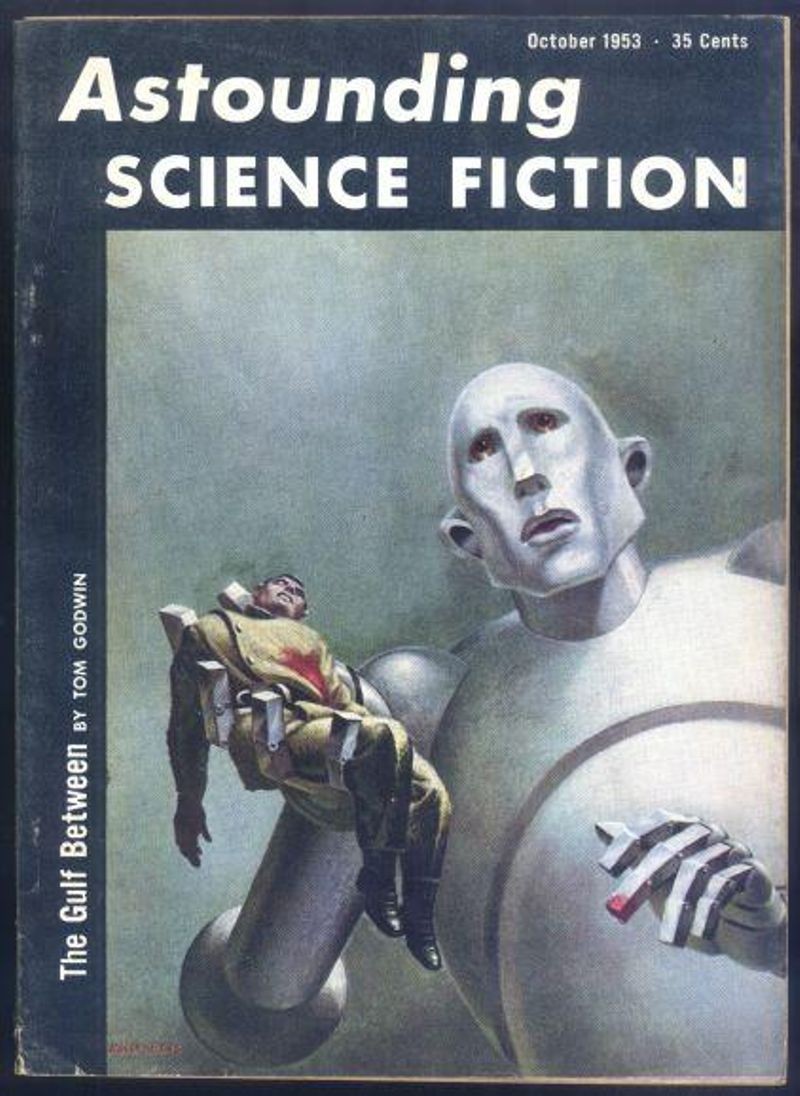
Astounding Science Fiction, October 1953. Cover art by Frank Kelly Freas. Image credit: Chris Holmes.

Robot Rebellion scene from R.U.R. (Rossum’s Universal Robots), 1928–1929. © Billy Rose Theatre Division, The New York Public Library for the Performing Arts, Astor, Lenox and Tilden Foundations.
By the time the word “robot” was coined by Karel Čapek in his 1920 play R.U.R. (Rossum’s Universal Robots), the automatons of centuries past had lost much of their luster and robots as we think of them today began to appear frequently in popular culture, long before the academic fields of robotics or artificial intelligence. Films like Metropolis (1927) and pulp fiction series like Astounding Stories, which would later become Astounding Science Fiction, put the modern, humanoid robot on everyone’s minds.
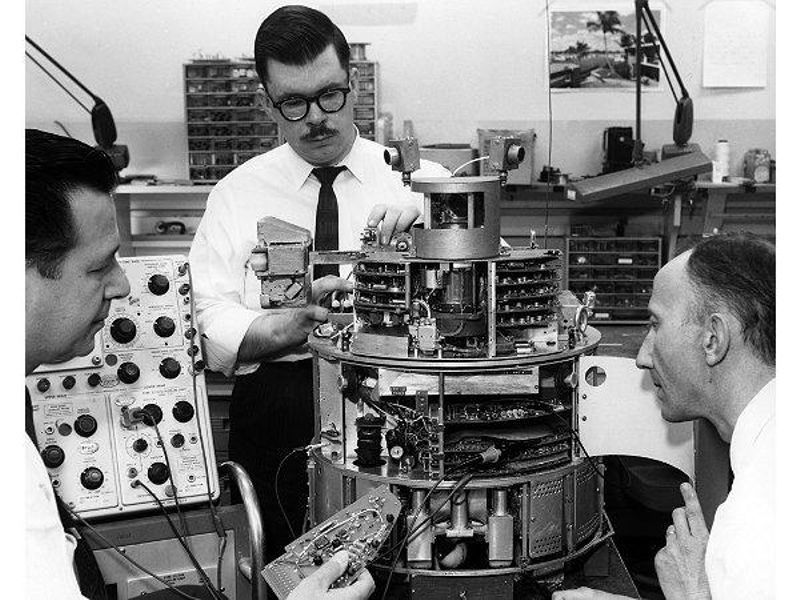
Imagination quickly led to innovation. Technological and industrial advances following the Second World War, such as miniaturization, sensing, and energy storage, produced some of the earliest modern robots. Notably, George Devol patented a process for controlling machines using magnetic recordings in 1946 and would later conceive of the Unimate line of industrial robots that worked the assembly line for General Motors.
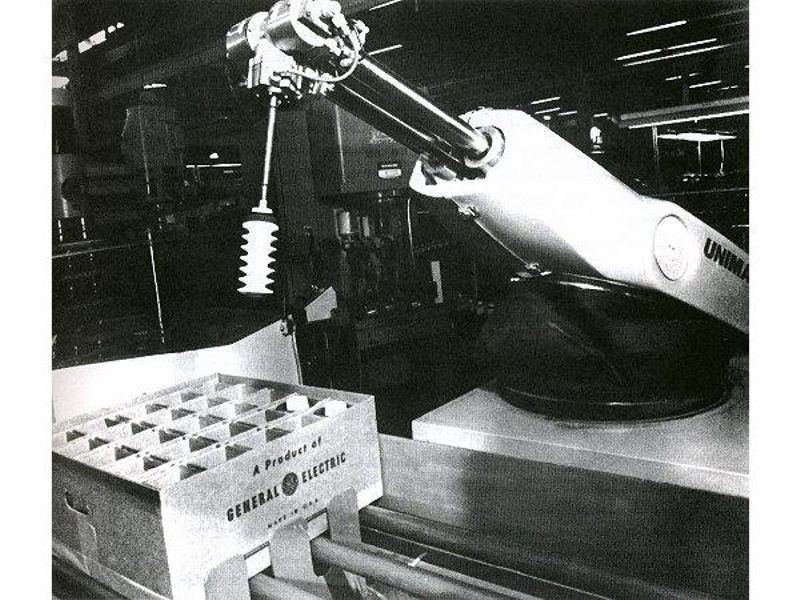
Unimate at General Electric, ca. 1963.
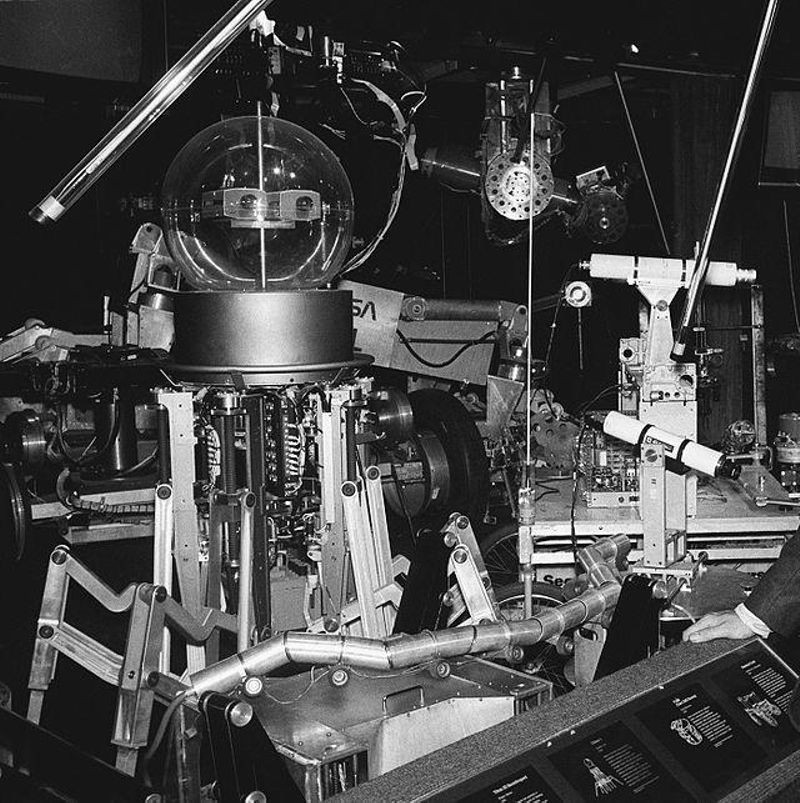
Robot Theater in Smart Machines, 1987. The Computer Museum.
The Computer Museum (TCM) in Boston, predecessor to the Computer History Museum, was revolutionary in recognizing robotics and artificial intelligence as a significant part of computer history. TCM held several early exhibits about robots, including Smart Machines, which was originally touted as the being the most important group of robots ever assembled in one place.
Mobile robots included: Shakey from Stanford University, The Prototype Mars Rover, the Stanford Cart, the quadruped Titan III from the Tokyo Institute of Technology, and a Denning Mobile Robot. Robot arms included the Unimate I, the Stanford Arm, the Direct Drive Arm-1 from Carnegie Mellon University, and the Tentacle Arm from MIT. Building upon this strong foundation set by TCM, the Computer History Museum continues to place an important emphasis on robotics and artificial intelligence in its collection as well as its exhibits—especially in Revolution: The First 2000 Years of Computing.
One of the most interesting early robots on display in Revolution is Edmund Berkeley’s Squee: the Robot Squirrel. Using two simple light sensors and two contact switches, Squee’s sole purpose was to gather “nuts” and bring them to his nest. These nuts were actually tennis balls, and Squee could only find them if the room was dark.

Squee: the Robot Squirrel, 1951. Designed by Edmund Berkeley. Image © Mark Richards.
Another favorite of mine in Revolution is a robot built by the Applied Physics Laboratory at John Hopkins University in the 1960s, simply dubbed “The Beast.” The Beast was significant in that it was not powered by a computer; instead, it used transistors to create logic gates that allowed it to reason out a path as its sensors picked up various obstacles. The Beast roamed hallways, and then when power ran low, it could sense black wall outlets and plug itself in to recharge. Recharging would become an influential concept, especially in modern consumer robots such as the Roomba.
The Beast, 1961. Designed by John Hopkins University, Applied Physics Laboratory
Robotics has greatly enriched the field of prosthetics. The Rancho Arm was developed at Rancho Los Amigos Hospital in Downey, California, and was one of the first attempts at a computer-controlled arm. The Rancho Arm had six joints, allowing it to reasonably mimic the motion of the human arm. The device was heavy, more than 70 pounds, making it less attractive to use as a prosthetic. It did, however, influence further designs of robotic arms for medical and industrial uses.
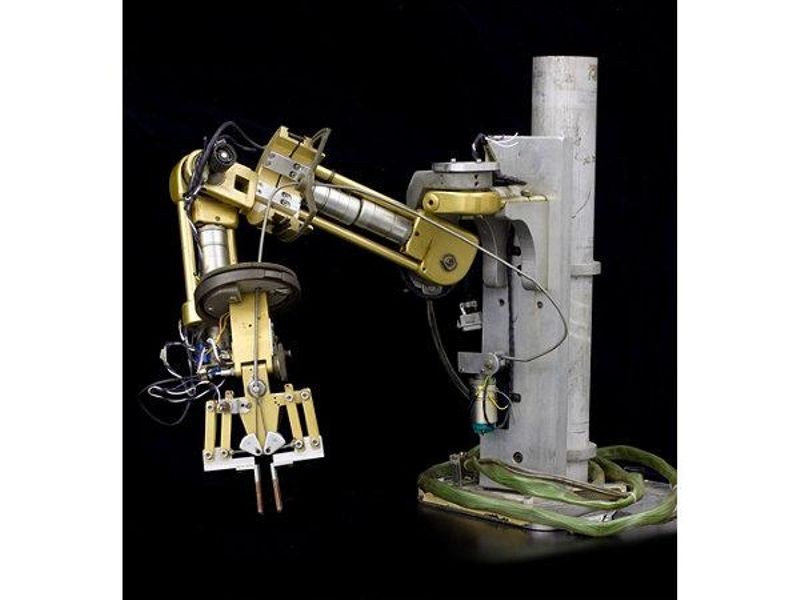
Rancho Arm, ca. 1962. Designed by Rancho Los Amigos Hospital. Image © Mark Richards
In the late 1960s, the team at the Stanford Research Institute (SRI) designed Shakey, one of the first intelligent mobile robots. Designed to reason out a path using input from its variety of sensors, Shakey was one of the most ambitious attempts at an autonomous robot. The system used onboard sensors, range finders, and a TV camera, to create a map of its environment. It wirelessly sent that information to minicomputers, which processed it and determined viable paths and movements. This technique made for a slow system, averaging about two meters an hour.

Shakey, 1969. Designed by Stanford Research Institute (SRI). Image © Mark Richards.

Stanford Cart, 1960–1980. Designed by the Stanford Artificial Intelligence Laboratory (SAIL). Image © Mark Richards.
Perhaps one of the most important groups leading research in robotics during the 1960s and ’70s was the Stanford Artificial Intelligence Laboratory, known as SAIL. SAIL attracted many of the top minds in robotics research and developed projects that would have a lasting impact on the field.
The Stanford Cart began as a test bed for a moon rover that could be controlled from Earth. Led by James L. Adams, the original cart was a tethered prototype that used car batteries and bicycle tires. As time went on, the project evolved and the cart morphed into a robotic road vehicle, designed to be controlled by a human operator. Eventually, it became an autonomous vehicle, but with a few drawbacks: It could only follow a bright white line under controlled lighting.
A later version of the cart system managed to cross a chair-filled room in roughly five hours. The cart would move one meter, recalculate using a television camera and other sensors, then 15 minutes later it would move another meter. While this may seem unreasonably slow, it managed to cross a room without human intervention, a major step along the road towards today’s self-driving cars, which has also been an area of research for the current incarnation of SAIL.
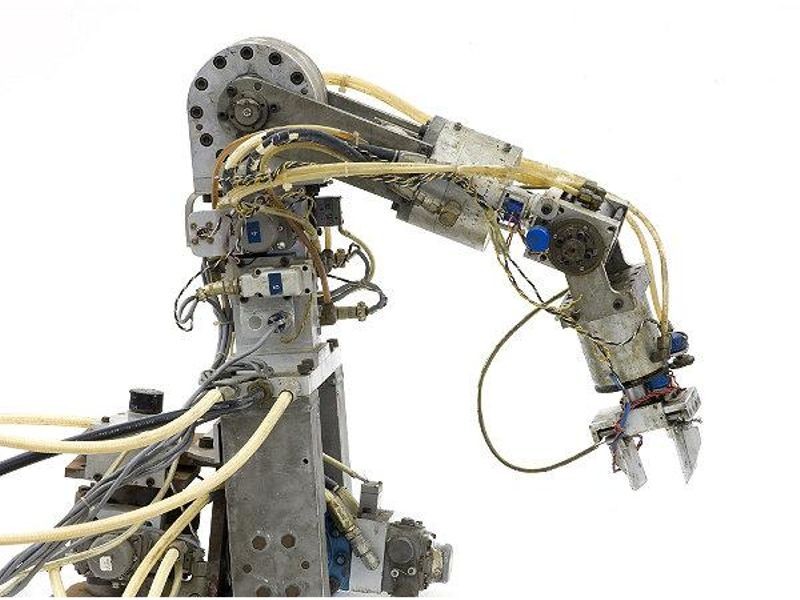
Stanford Hydraulic Arm, 1966–1968. Designed by the Stanford Artificial Intelligence Laboratory (SAIL). Image © Mark Richards.
Robotic arms are another major subcategory in the fields of robotics and artificial intelligence. The Hydraulic Arm from SAIL was designed to test whether a robotic manipulator could operate at the speed of the computer controlling it. Using a PDP-6, the arm did operate quickly, but the mass of the arm moving at such a speed led to the entire room shaking as it worked. Eventually, SAIL had to reinforce the floor of the room in order to keep the arm from doing damage to the building!

The Orm, 1965. Designed by Victor Scheinman and Larry Leifer. Image © Mark Richards.
SAIL researchers Victor Scheinman and Larry Leifer developed the pneumatically-powered arm Orm. The Orm, which is Norwegian for “snake,” featured 28 rubber sacks sandwiched between steel plates. By inflating various combinations of sacks, the arm would move. While this method proved inexact, the concept of pneumatically-driven arms has continued.
Modeling animal motion in robots has also been an area of interest among roboticists around the world. Dr. Shigeo Hirose of the Tokyo Institute of Technology specializes in developing robots, like the Oblix, whose movements are inspired by different animals. Adopting the properties of a snake, the Oblix had a segmented body that crept and slithered on the floor using small wheels. The Oblix operated as both a robotic arm and a tethered rover. It was released commercially as the MOGURA robot arm.

The Oblix, ca. 1978. Designed by Hirose Robotics Laboratory, Tokyo Institute of Technology. Image © Mark Richards.
Human bipedal locomotion was another area of research among early roboticists, especially in the 1980s. Isao Shimoyama and Hirofumi Miura of the University of Tokyo created the Biper series of robots as an experiment to see if they could make a robot that could walk like a human. By the third iteration, Biper-3, the robot had long legs, feet, and ankles, but no knees; this resulted in a walk that was harsh and jerky. Biper-4, on display in Revolution, had mechanized knees, but was so unsteady that it required large ski-like feet to remain steady! Eventually, five different Biper systems were developed, though none were able to convincingly mimic a human stride.

Biper-4 robot, 1983. Designed by Isao Shimoyama and Hirofumi Miura, University of Tokyo. Image © Mark Richards.
The pace of robotics research has not slowed. Projects like SRI’s Centibots (currently in the Museum’s collection) and Boston Dynamics’ robot cheetah, are still testing the limits of what’s possible with the application of processing power to mechanical forms. And as long as people are still building research robots, we’ll keep on collecting them!